嵌入式-手把手教你制作ESP32智能门铃(ESP32-S3、OV2640摄像头、蜂鸣器、舵机)
前言
电源方向资料免费开源到QQ群1:280730348和QQ群2:725438563。
嵌入式方向资料免费开源到QQ群1:976387827。
博客地址edadong.com,博文同步发布在知乎、bilibili,其中bilibili主要以视频为主。对开源项目的疑惑请尽量在b站下方留言,其次在群内商讨,所有开源项目均自己设计验证过。
由于个人精力有限,以后不做免费的私聊问题回答,但B站我会做最快的响应回答,群内看到了也会回答。如果确实是想私聊问问题,5-15元一次答疑,避免太多人找我,此初衷主要是想更多人看到问题的解决方法或者开源项目这么做的意义,在B站解答大家都能看得到,私人解答就丢失了开源解答的优势了。
更详细的讲解请移步Bilibili:EDAdong。
设计目标和方案
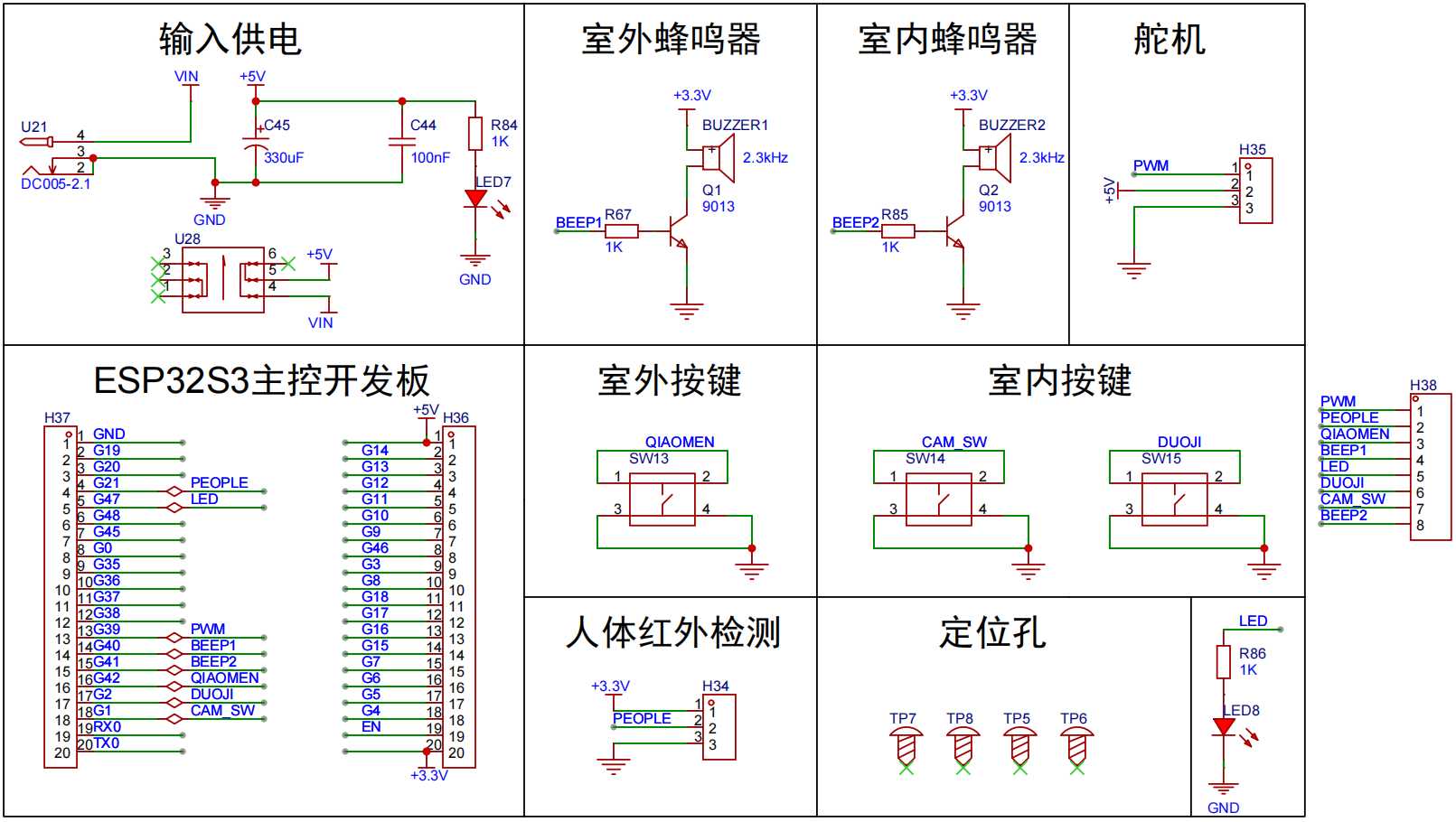
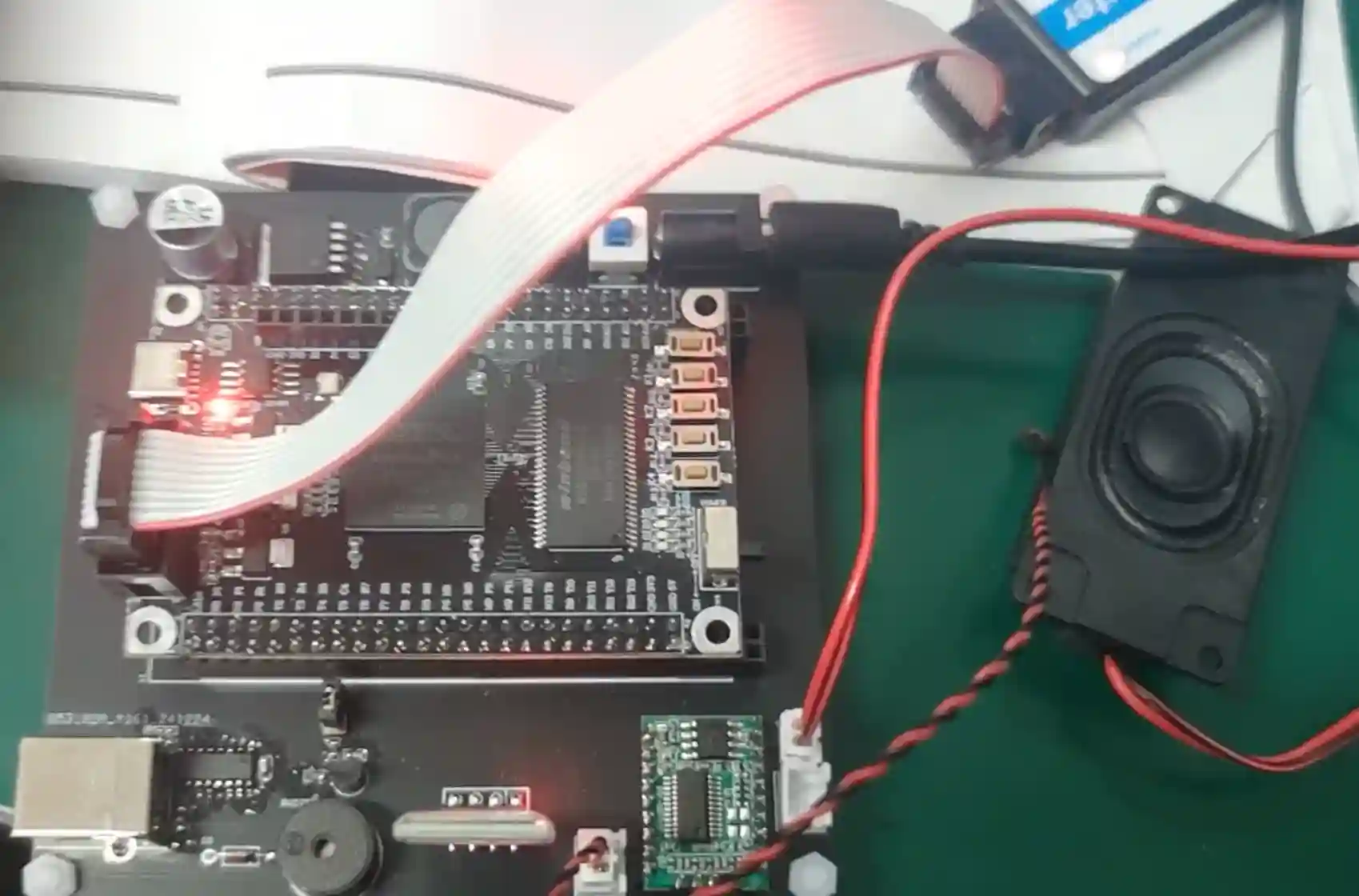
(1)主控选用ESP32-S3,内部自带WIFI,摄像头选用OV2640;
(2)室内室外都分别有一个按键和蜂鸣器,其中按下室外的按键,室内和室外蜂鸣器都能鸣响;
(3)按下室内的按键,摄像头开启,通过手机查看图像;
(4)设置一个按键在室内,可以控制舵机完成开门动作;
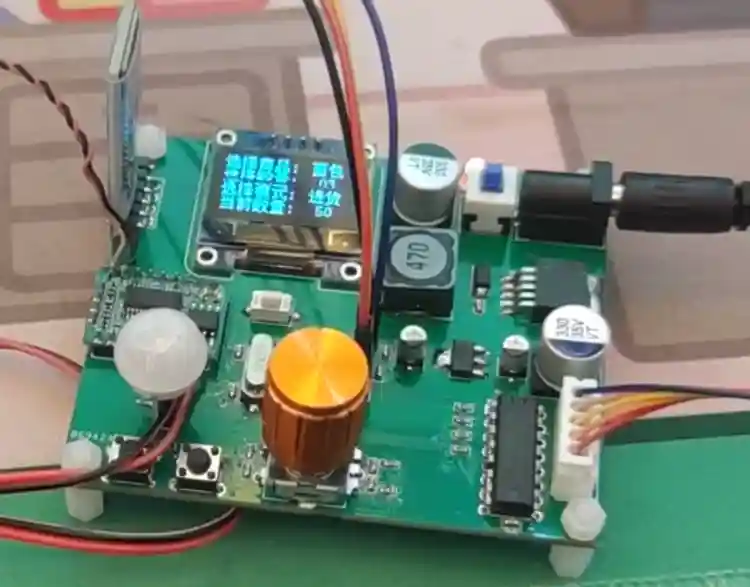
(5)通过红外热释传感器检测室外是否有人,有人则室内LED灯点亮,提醒有人;
注意事项
需要事先通过ESP32自带的串口获得摄像头显示对应的网段,浏览器输入对应网段才能显示。需要链接同一个网络才可以实现显示。
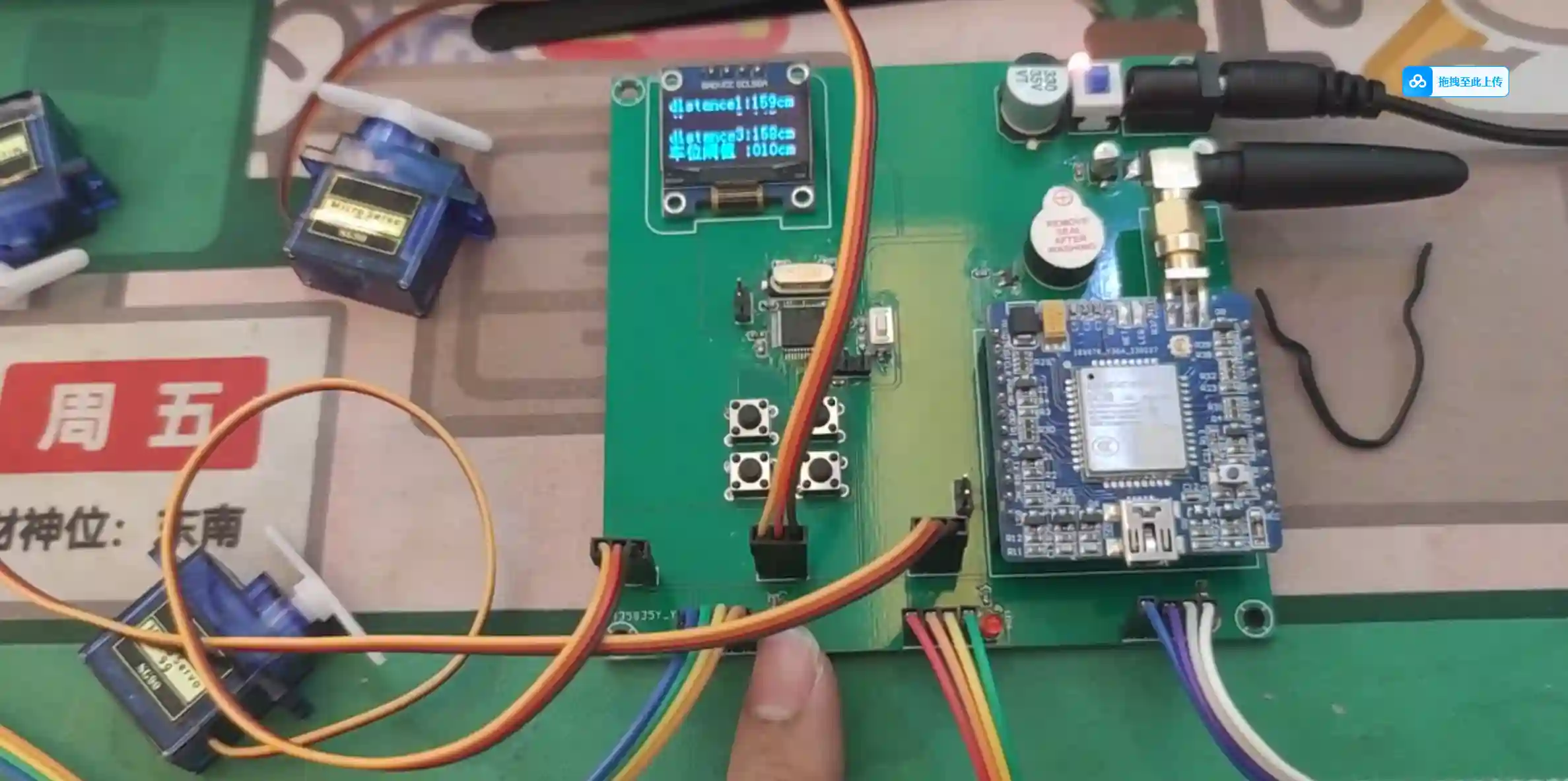
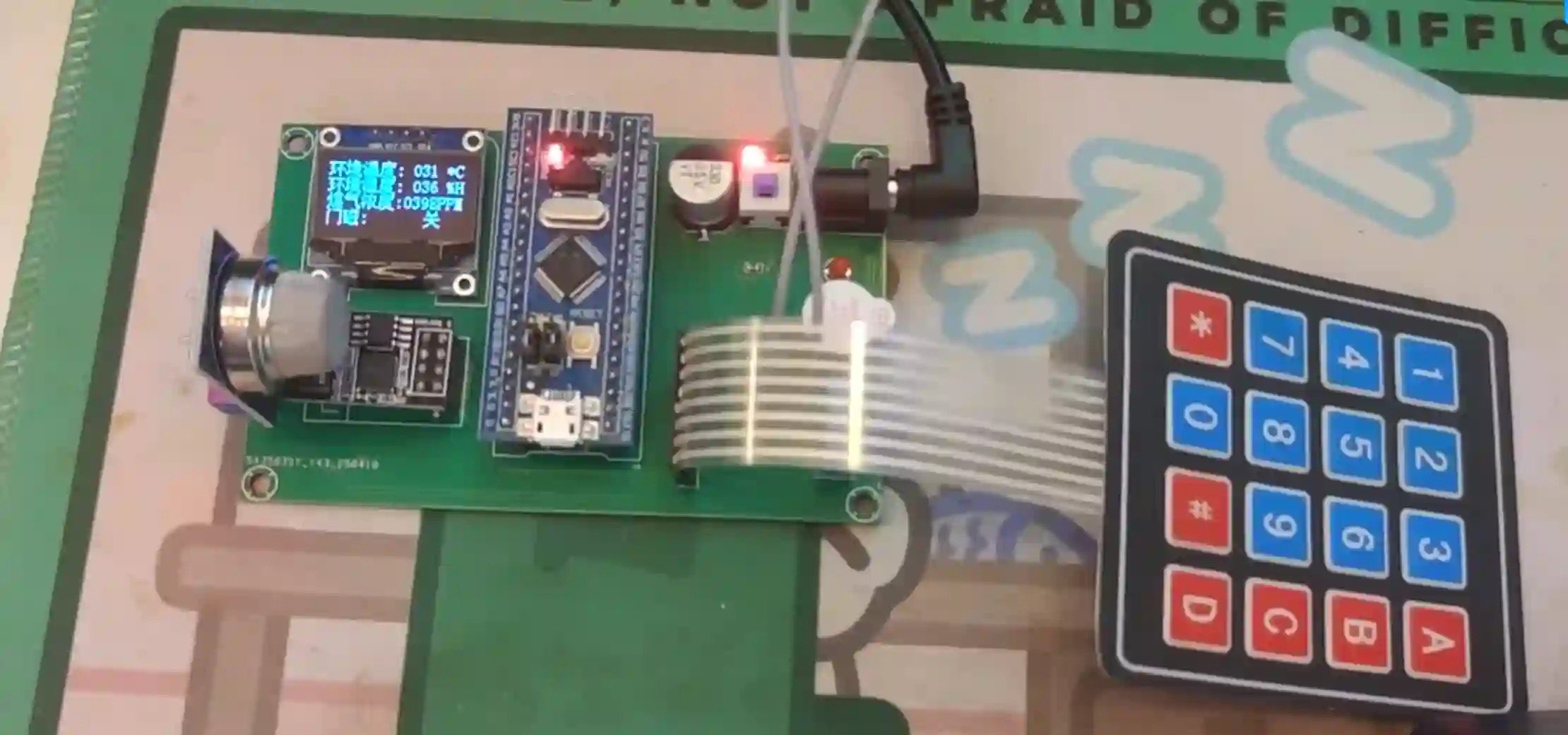
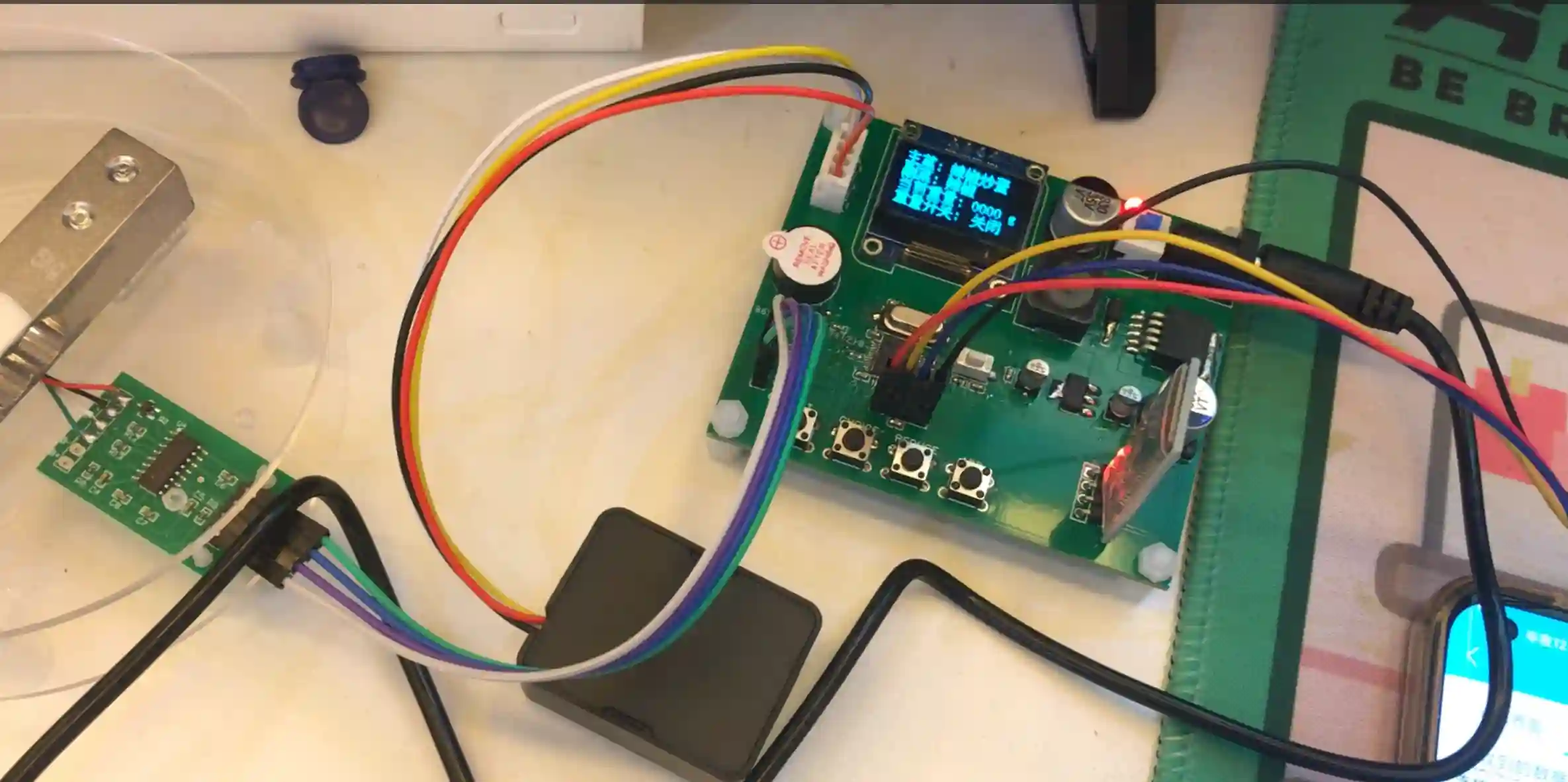
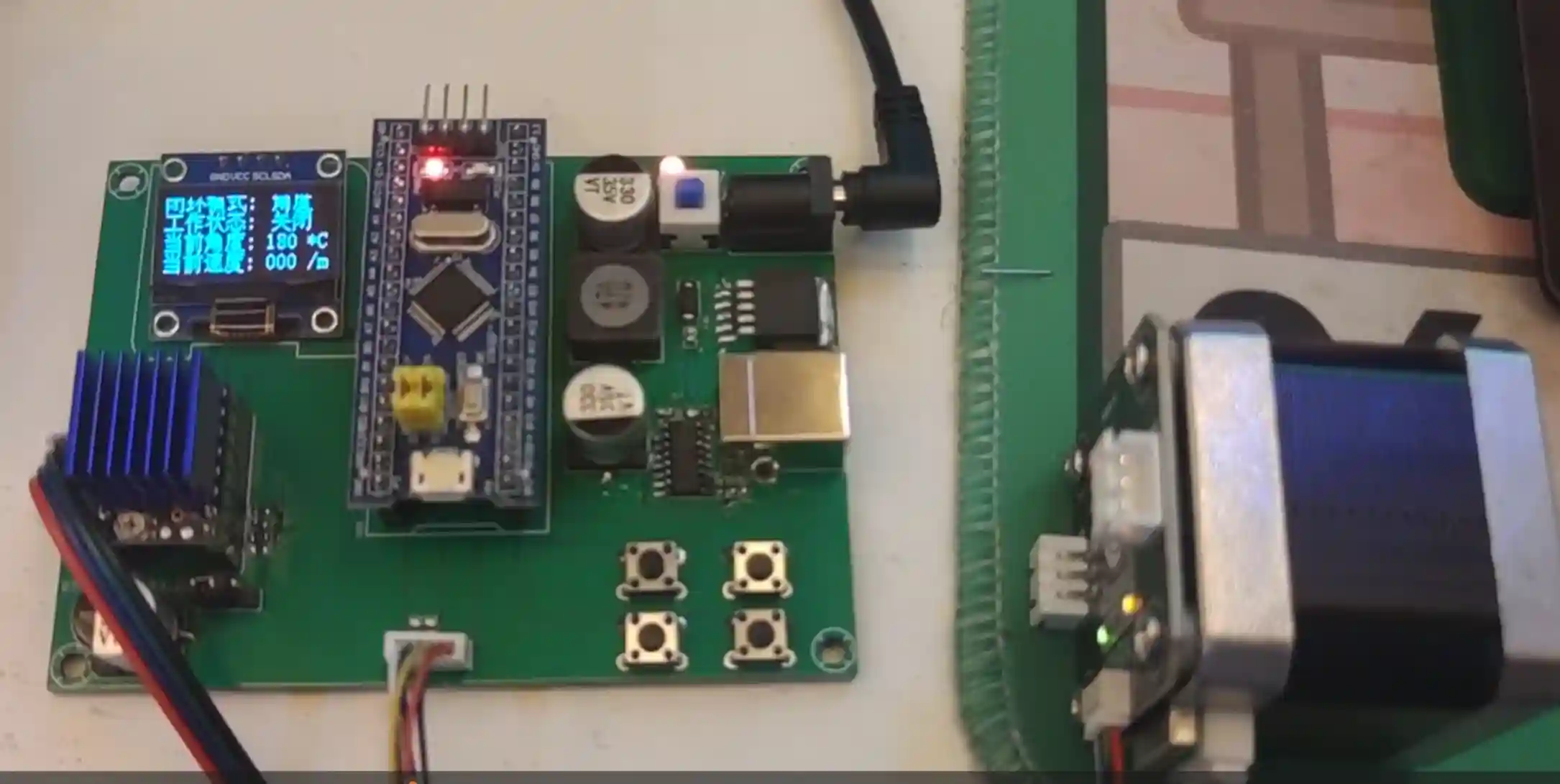
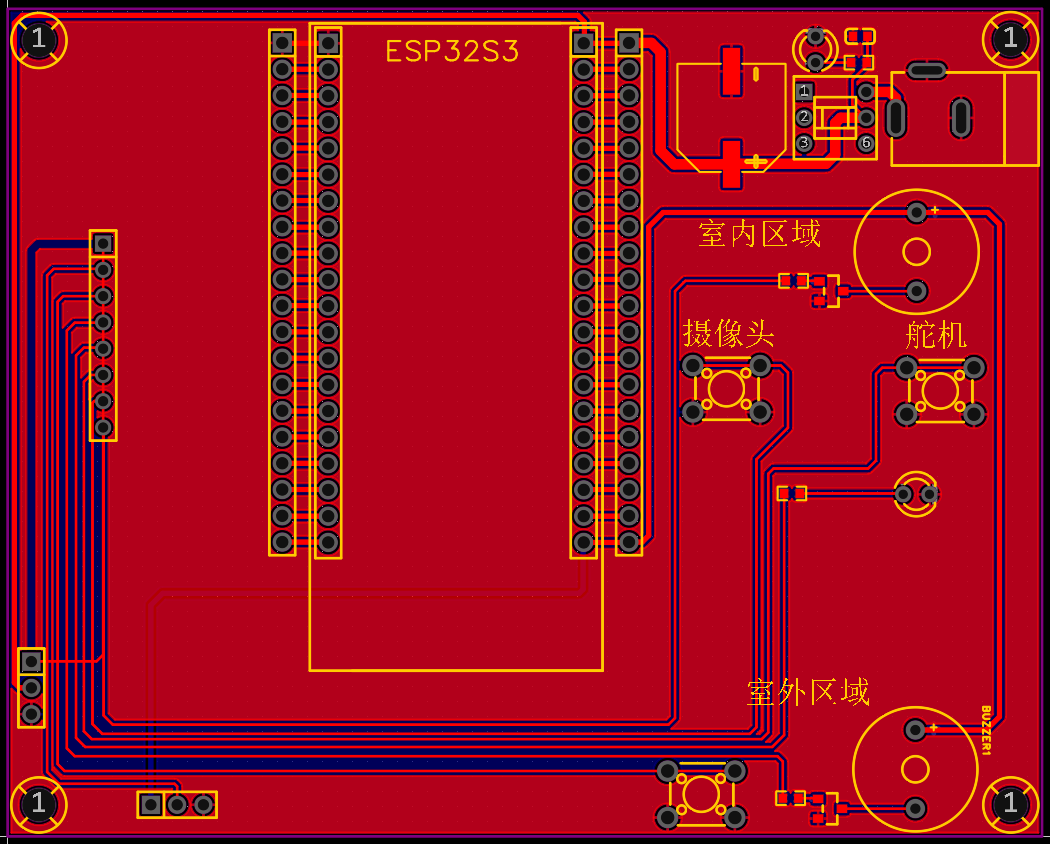
原理图及实物图
代码
/********************************************************************** |
总结
通过网盘分享的文件:post22资料合集
链接: https://pan.baidu.com/s/1qL7H8010NULXnRA8rkf2jg?pwd=5yaq 提取码: 5yaq
–来自百度网盘超级会员v6的分享
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 EDAdong_Blog!
相关推荐
2025-06-08
嵌入式-手把手教你制作FOC无刷电机驱动电路(STM32移植,结合灯哥和loop222大佬)
主控选用STM32F103C8T6芯片(经过搜索资料,这个系列芯片72M主频可以跑FOC无刷电机控制),屏幕显示用0.96寸OLED屏幕,IIC接口的,分别是GND/VCC/SCL/SDA引脚,无刷电机选择2208型号的云台电机,相电阻大于10欧姆,峰值电流拟定2.5A左右,检测电机旋转角度的磁编码器型号为AS5600,IIC协议接口,电机三相半桥驱动芯片采用DRV8313芯片进行驱动,自带过流保护、短路保护、欠压闭锁、过温保护的内部关断功能,电机相电流监测芯片采用INA240A2PWR芯片进行检测,50倍的增益,参数的调节和控制采用EC11旋转编码器进行旋转控制,以及参数的选择,电源拟采用12V电源适配器供电。
2025-06-09
嵌入式-手把手教你制作超声波测距电路(基于STC89C52,可用作普通51单片机课毕设最小系统模板)
主控选用STC89C52芯片,屏幕显示用LCD1602屏幕,超声波模块选用HC-SR04模块,电源拟采用5V电源适配器供电。
2025-06-10
嵌入式-手把手教你制作简易双通道示波器(STM32F4移植,双通道采集)
主控选择STM32F401,双通道,每个通道通过拨码开关确认输入范围,分别是无衰减和衰减50倍。我尽量满足单通道显示,在此基础上再优化双通道显示。电压五十伏以下频率一千赫兹以下。由于我手头没有信号发生器,所以会到时候再弄两个个dac口输出信号,用来模拟检测。
2025-06-20
嵌入式-手把手教你制作应变信号检测电路(以太网接口,AD数据采集)
可以检测应变片按压后所带来的变换情况,检测量通过电压的方式呈现。同时板载以太网接口,可以通过百兆以太网将数据传输至上位机等后续开发端。
2025-07-19
嵌入式-基于EP4CE6F17C8的创新音乐播放器设计(Matlab上位机、语音识别、蓝牙)
本设计基于Altera的FPGA开发板实现了一个创新的音乐播放器,利用蜂鸣器生成音乐,同时通过蓝牙无线控制实现了智能化交互。系统通过FPGA内置ROM存储音乐谱子,采用精确的PWM控制逻辑生成音符频率,模拟不同音调,完全摆脱传统音频模块的依赖,展现了数字电路在声音合成领域的强大能力。蓝牙控制模块通过手机APP发送命令,实现了播放、暂停、音量调节、切换曲目等操作,使系统具备现代化的物联网特性。蜂鸣器作为播放设备,结合精细的逻辑设计,能够以极高的频率分辨率精准输出音符,体现了FPGA硬件控制的实时性和高效性。此外,ROM中预存音乐数据可根据需要灵活扩展,支持存储多首曲目,并通过智能算法管理播放节奏和切换逻辑。同时本设计还加入语音识别模块,可以实时识别使用者语音并做出相对应的动作,如实现蓝牙控制的所有功能,按键也可实现相对应的功能。
2025-10-01
嵌入式-基于STM32的自动售货机商品管理与交易系统(步进电机、旋转编码器、语音识别、蓝牙)
主控选择STM32F103C8T6,屏幕显示选用0.96寸OLED屏幕显示,IIC协议通讯。通过红外热释传感器检测人体,若检测到人后通过CI03T语音模块与用户进行交互。板载EC11旋转编码器,可通过编码器选择商品的种类以及对应的数量。出货通过步进电机模块进行模拟,根据出货的数量步进电机模块对应转动N圈。通过无线蓝牙模块交互,手机设计蓝牙APP,可以实现远程通过手机进行购买以及出餐。还会在软件里面加入进货功能,比如步进电机正转代表出货,反转就代表进货。
评论